Coastal and river‑crossing bridges rely on underwater pier foundations to maintain long‑term structural stability. Constant erosion from flowing water, marine corrosion, sediment abrasion and long‑term tidal impact often lead to concrete cracks, hollowing and barnacle fouling on submerged bridge piles. Traditional bridge underwater inspections mainly depend on professional divers, which brings high operational risks, slow progress and limited detection accuracy. Remotely Operated Vehicles (ROVs) provide a safer, more efficient underwater‑inspection solution, eliminating risky in‑water human operations, detecting structural cracks precisely and securing long‑term public traffic safety.

Replacing dangerous diver‑led underwater work stands out as the core advantage of ROV‑based bridge‑pier inspection. Bridge piers are surrounded by swirling undercurrents, tangled ropes, sharp broken debris and slippery submerged concrete. When divers dive beneath the dock and bridge deck, they face huge threats including underwater entrapment, impact injuries and sudden water‑flow surges. The ROV allows engineers to perform full‑scale underwater surveys entirely from land or a surface boat. Technicians operate the robot remotely via a control console and view real‑time underwater video feeds. No staff needs to dive into harsh aquatic environments, completely cutting down life‑threatening risks during regular bridge‑structure inspections.
High‑precision crack detection supports detailed structural‑defect assessment. Tiny fissures on submerged bridge piles are invisible from the shore. If left unaddressed, these small cracks will gradually expand under long‑term water erosion, eventually triggering concrete peeling, pier deformation and even potential bridge collapse. Equipped with high‑definition cameras and adjustable high‑power LED lights, the compact ROV can navigate into narrow gaps beneath bridge abutments. It moves closely along pier surfaces to capture clear close‑up footage, identifying micro‑cracks, corrosion patches, hollow‑concrete sections and biofouling. Inspectors record the position, length and width of every crack to compile complete inspection data.
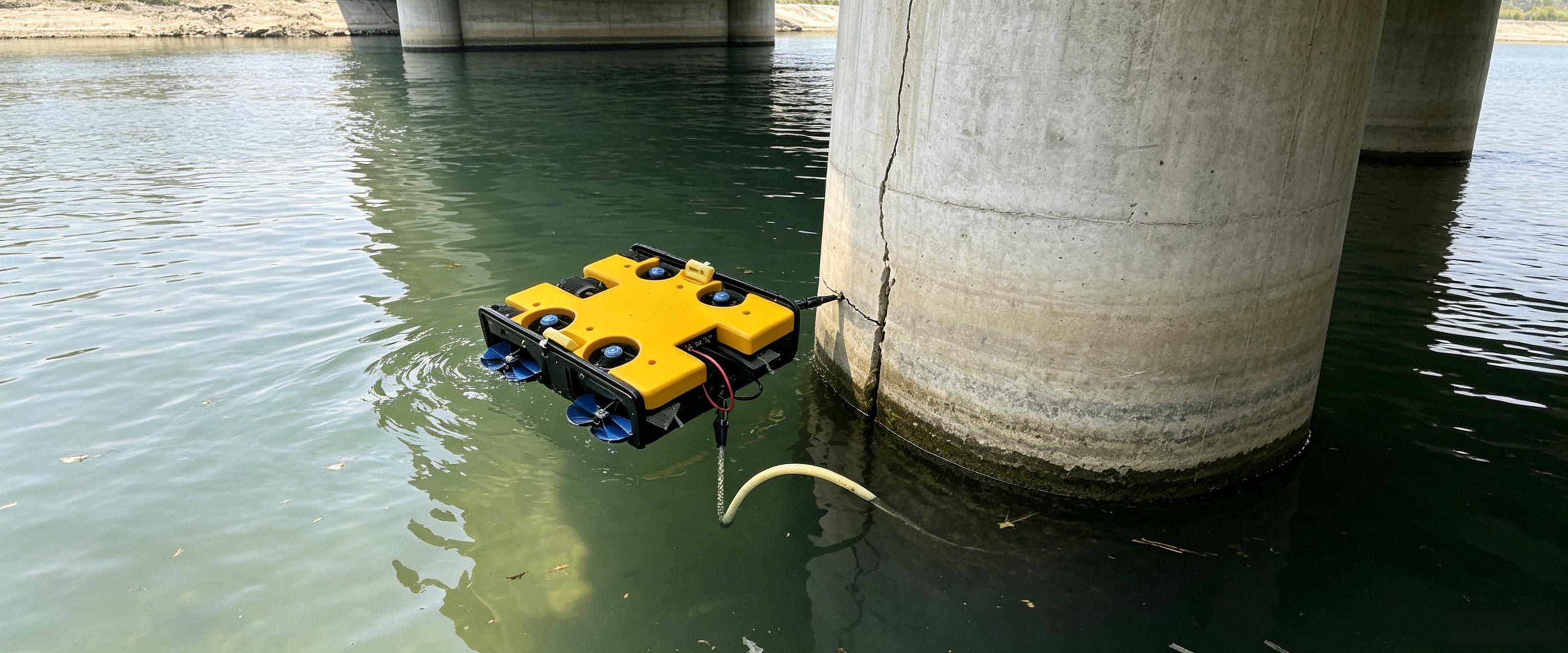
Timely defect monitoring delivers critical safety significance for public transportation infrastructure. Bridges are key links for road‑traffic networks. Undiscovered underwater pier damage will gradually worsen over years, which may cause unexpected structural failures and trigger serious traffic accidents. Periodic ROV patrols enable predictive maintenance. In this on‑site case, the underwater ROV surveyed the concrete dock pier under a wharf. It searched for hidden cracks and recorded corroded areas on the submerged foundation. The inspection report guided maintenance teams to carry out targeted grouting and reinforcement before structural defects worsened, preventing potential bridge‑collapse hazards in advance.
Beyond crack detection, ROVs can also measure pier erosion depth, check anchor‑bolt conditions and map seabed scouring around bridge foundations. It adapts to river bridges, coastal viaducts and port dock‑structure inspection scenarios.
In conclusion, underwater ROVs have revolutionized conventional bridge‑inspection workflows. By removing risky manual underwater operations, accurately detecting pier cracks and safeguarding transport‑infrastructure safety, underwater robots conduct essential regular health checks for bridges. As aging river‑crossing and coastal‑bridge projects keep growing, customized ROV systems will continuously protect long‑term structural safety of public traffic facilities.




